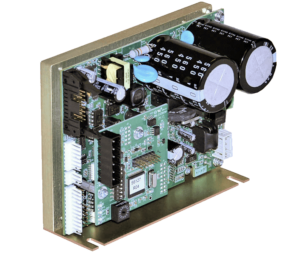
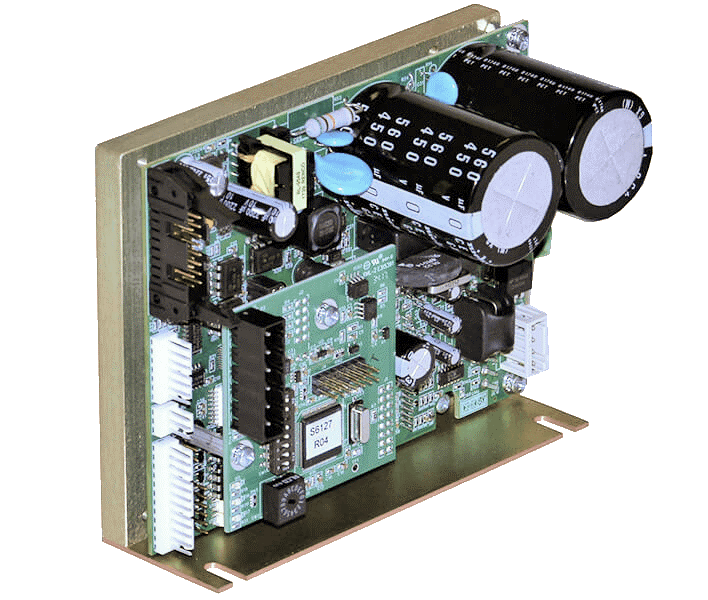
Luminary Servo Drives

Luminary Series servo drives offer an alternative to OEMs and a cost-competitive alternative to stepper control systems.
Luminary Series Servo Drives provide the OEM market with a low cost but high-performance servo drive for use in applications such as x-y tables, actuators, roll feeders, or any requirement where true position, velocity and torque control are desired. The Luminary Series is a cost-competitive alternative to stepper control systems.
Drive features: LD-330, LD-500 & LD-101
- Three Drive Sizes: 3.3 amp, 5.0 amp and 10.0 amp rms continuous at 45°C
- Integral Power Supply – Line input voltage range: 100 – 240vac
- +/- 10v analogue control input with sinusoidal drive output for smooth torque and velocity control
- Option card interface for customised OEM digital drive communications
- Four optically isolated 24vdc digital inputs
- Two optically isolated 24vdc digital outputs
- Motor encoder input, 5vdc, quadrature, ABZ/UVW
- Repeater output of encoder feedback for interfacing to an analogue position controller
- Easy setup for your motor and drive configuration
- Optional: ISOCOMM1 – Factory communication interface for updating firmware and motor parameters
The versatile Luminary drives, LD-330, LD-500 and the LD-101, are digitally controlled and will drive low-cost servo motors up to 3000 watts. A standard analogue input interface with encoder feedback provides the basic needs of a servo motor drive system. Input selectable velocity or torque mode provides real-time dynamic control.
Optional adaptor cards can piggy-back onto the drive to provide various standard or custom digital control schemes. Currently, the IIS drive network option card is available for multi-axis connectivity using the LMC-400 controller.
A development port connector, for access by the OEM, uses the ISOCOMM1 interface adapter. The ISOCOMM1 provides an isolated RS-232 connection to your PC.
Easy to use PC based L-Drive software for commissioning the system, available at no extra cost, is used for setting up motor/ drive parameters and tuning the motor response to the load. Once set, the configuration firmware resides on the board giving the board the correct personality for the motor it will drive.